MappyDot Calibration
The VL53L0X has 4 different calibration modes which implement the standard VL53L0X API calibration routines. More information about these calibration functions can be found in the ST VL53L0X API documentation.
- Reference SPADs calibration - Calibrates the SPAD arrays.
- Temperature calibration - Temperature calibration adjusts the device sensitivity when the temperature changes. This is performed at startup and should be performed again when the temperature varies by more than 8 degrees Celcius.
- Offset calibration - Calibrates the offset of the sensor. This should be performed after assembly (including the glass cover).
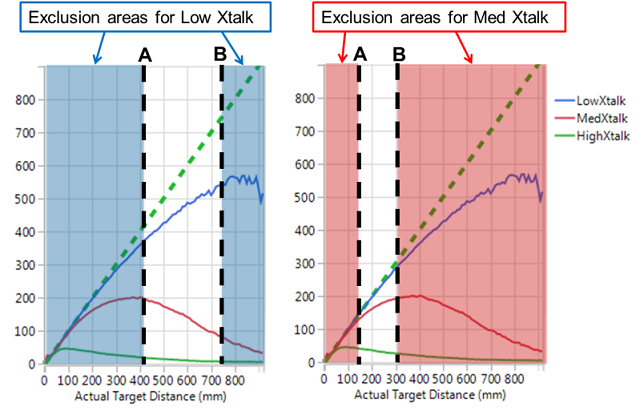
- Cross-talk calibration - Calibrates the "cross-talk" that is received from a close reflected surface such as a glass cover on the sensor. This must be performed if using a clear cover on the sensor or an aperture that restricts the viewing angle of the sensor. More information about calibration with a glass cover is detailed in this application note.
The MappyDot will automatically switch to single ranging mode to perform these calibration routines. The targets discussed here are standard Munsell neutral chart values (Grey 17% N4.74, White 88% N9.5):
| Munsell | Approximated Colour |
|---|---|
| N9.5 | |
| N4.74 |
Calibration Routine
Reference SPADs Calibration
There are no specific environmental conditions required for calibrating the reference SPADs. If a highly reflective target is covering the VL53L0X module during reference SPAD calibration, the calibration may fail. In this case, user has to move the target away from device.
Temperature Calibration
You will first need to perform the Reference SPAD calibration routine before calibrating temperature. There is no specific environmental conditions required for calibrating the temperature.
Offset Calibration
It is recommended to use a white (88% reflectance) target at 100mm, in a dark environment when performing this procedure. Target distance can be changed depending on constraints. You will first need to perform the Reference SPAD and temperature calibration routines before calling the offset calibration routine. This routine should be performed after a glass cover is installed if using a glass cover.
Once offset calibration has been completed, be sure to write the current settings as the default startup settings.
Cross-talk Calibration
You will first need to perform the Reference SPAD, temperature calibration and offset calibration, before calling the cross-talk calibration routine.
It is recommended to use a grey (17% reflectance) target in a dark environment when performing this procedure. Next choose the distance required for this target depending on the type of cover being used:
Once cross-talk calibration has been completed, be sure to write the current settings as the default startup settings.
Registers
The MappyDot can perform the above VL53L0X API calibration routines using the following configuration registers:
- a (0x61) [target_distance_bytes] - Calibrate Distance Offset
- x (0x78) [target_distance_bytes] - Calibrate Crosstalk
- u (0x75) - Calibrate Reference SPAD
- U (0x55) - Temperature Calibration
If these routines fail, the LED will blink a calibration fail code.
Code Example
Here's an Arduino code sample for performing the offset calibration routine:
#define CALIBRATE_DISTANCE_OFFSET (0x61)
#define CALIBRATE_SPAD (0x75)
#define TEMPERATURE_CALIBRATION (0x55)
void mm_to_bytes(uint8_t *bytes, uint16_t mm)
{
bytes[0] = (mm >> 8 & 0xFF);
bytes[1] = (mm & 0xFF);
}
void offset_calibration_routine()
{
set_led_mode_off();
delay(500);
/* Calibrate SPADs */
Wire.beginTransmission(address);
Wire.write(CALIBRATE_SPAD);
Wire.endTransmission();
delay(1000);
/* Calibrate Temperature */
Wire.beginTransmission(address);
Wire.write(TEMPERATURE_CALIBRATION);
Wire.endTransmission();
delay(1000);
/* Calibrate Offset */
uint8_t calib_dist = 100; //In millimeters
uint8_t dist_bytes[2];
mm_to_bytes(dist_bytes, calib_dist);
Wire.beginTransmission(address);
Wire.write(CALIBRATE_DISTANCE_OFFSET);
Wire.write(dist_bytes[0]);
Wire.write(dist_bytes[1]);
Wire.endTransmission();
delay(10000);
Serial.println("Calibration Complete");
}